ROS Study2 - 로봇 운영체제 ROS
2023. 1. 14. 12:07ㆍ공부방
ROS란?(Robot Operating System)
- open source를 기반으로, 손쉽게 가져다가 쓸 수 있습니다.
- ROS는 personal robot을 위해서 만들어진 운영체제
- 소프트웨어 프레임워크 - 로봇 소프트웨어를 개발하기 위한 소프트웨어 프레임워크
1. 노드간에 메시지 교환 방법으로 복잡한 프로그램을 잘게 나눠 공동 개발 가능
2. 로보틱스 생태계 생성
3. 명령어 도구, 시각화 도구 Rviz, GUI도구 모음 rqt, 3차원 시뮬레이터 Gazebo 지원

진정한 목적 : 로보틱스 소프트웨어 개발을 전세계 레벨에서 공동적업 가능하도록 생태계를 구축하는 것!
ROS는 새로운 운영 체제(OS) 인가? X ------->(메타운영체제이다.)
- 메타운영체제 : 분산 컴퓨팅 자원을 활용하여, 스케쥴링 및 로드, 감시, 등을 실행하는 시스템
- 전통적인 운영체제는 아니다. 오히려, ROS는 기존의 전통적인 운영체제(리눅스, 윈도우즈...)를 이용
- 이기종 디바이스 간의 통신 지원
- 기본적으로 Ubuntu, OS X 에서 구동하는 것을 추천!!
ROS의 구성
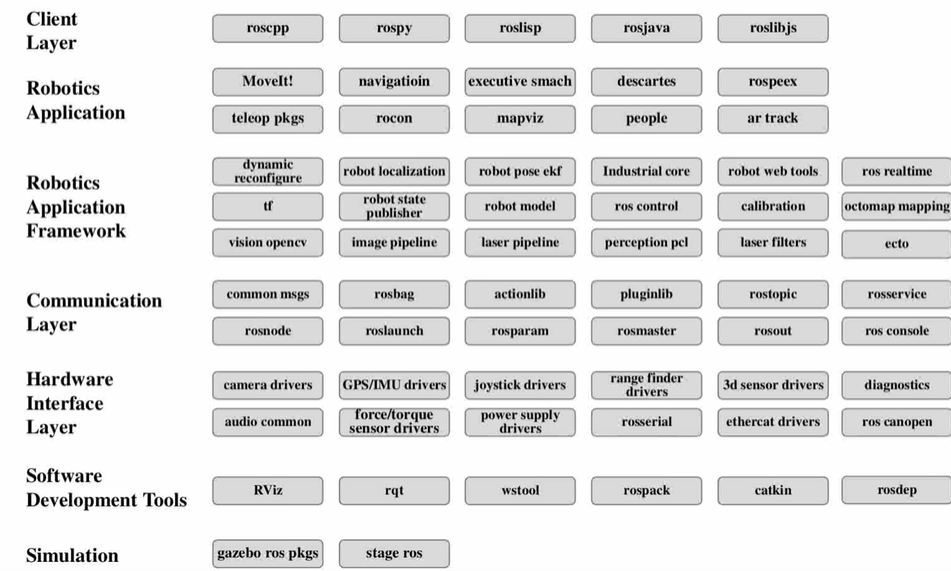
ROS의 생태계

ROS의 특징
- 통신 인프라
- 노드 간 데이터 통신을 제공
- 통상적 미들웨어로 지칭되는 메시지 전달 인터페이스 지원
(1) 메시지 파싱 기능 (2) 메시지의 기록 및 재생 (3) 메시지 사용으로 인한 다양한 프로그래밍 언어 사용 가능 (4) 분산 매개 변수 시스템 - 로봇 관련 다양한 기능
(1) 로봇에 대한 표준 메시지 정의 (2) 로봇 기하학 라이브러리 (3) 로봇 기술 언어
(4) 진단 시스템 (5) 센싱/인식 (6) 네비게이션 (7) 매니플레이션 - 다양한 개발 도구
(1) 로봇 개발에 필요한 다양한 개발 도구를 제공
(2) 로봇 개발의 효율성 향상
(3) Command-Line Tools
(4) RViz - 강력한 3D 시각화툴 제공, 레이저, 카메라 등의 센서 시각화
(5) RQT
(6) Gazebo - 3차원 시뮬레이터
'공부방' 카테고리의 다른 글
| ROS Study6 - ROS 도구 (0) | 2023.01.21 |
|---|---|
| ROS Study5 - ROS 명령어 (0) | 2023.01.19 |
| ROS Study4 - ROS의 중요 컨셉 (0) | 2023.01.19 |
| ROS Study3 - 개발환경 구축 (0) | 2023.01.14 |
| Ros Study1 - 로봇 소프트웨어 플랫폼 (0) | 2023.01.05 |